-
Ekskavatè a itilize Juxiang S600 Sheet Pile Vibro Hammer
1. Apwopriye pou ekskavatè 40 tòn a 50 tòn: Komatsu PC400, Hitachi ZX470, Caterpillar CAT349, Doosan DX420, DX490, Hyundai R480 R520, LiuGong 945E, Volvo EC480, SANY SY500, Shantui SE470LC, XCMG XE490D
2. avèk motè Parker ak kote yo pote SKF.
3. Ofri yon vibro-frape ki estab e pwisan jiska 600KN. Vitès pil jiska 9m/s.
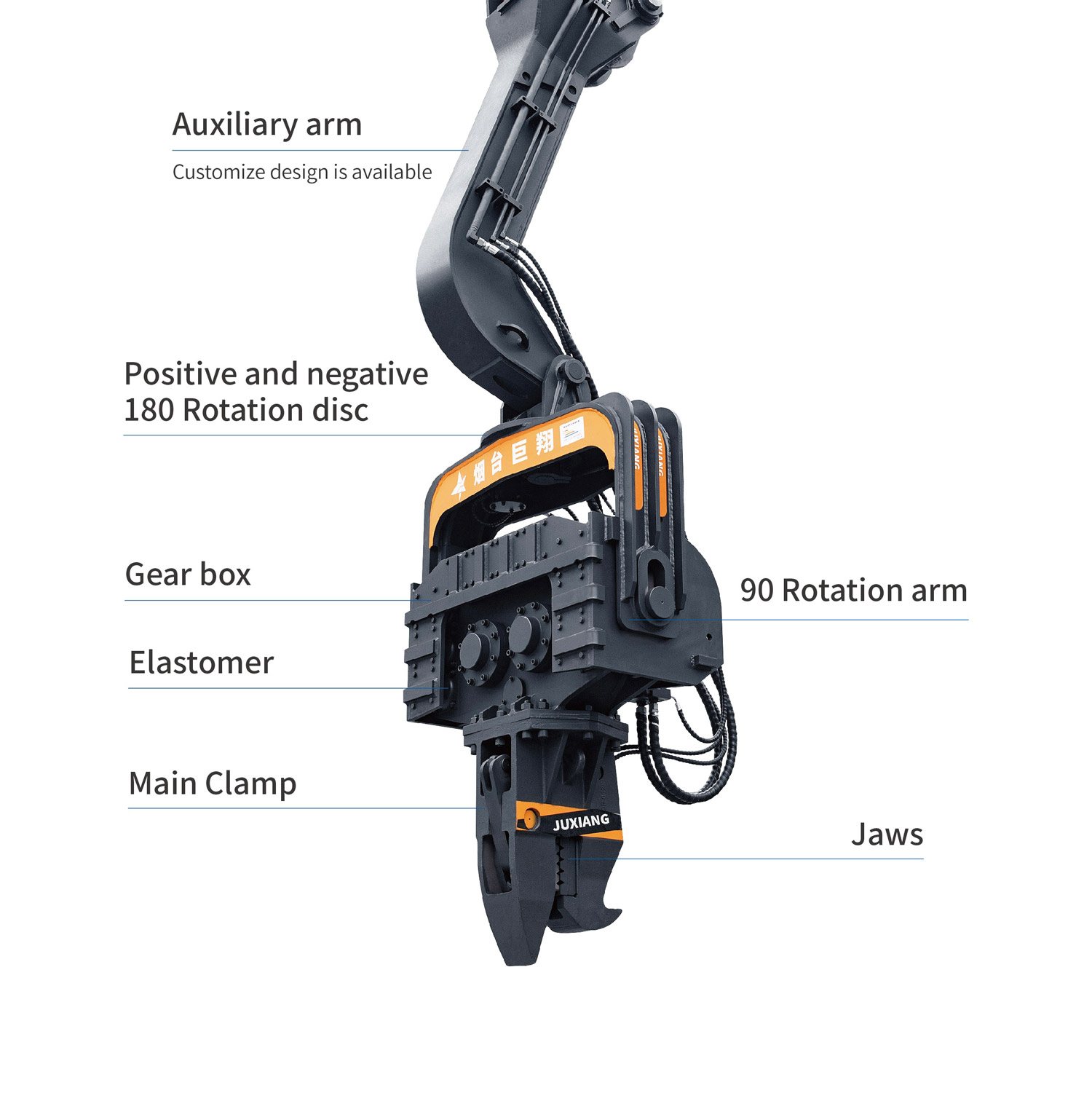
4. Kranpon prensipal pou Distribisyon, solid ak dirab -

Ekskavatè a itilize Juxiang S500 Sheet Pile Vibro Hammer
1. Apwopriye pou apeprè 30 tòn ekskavatè.
2. Ekipe ak motè Parker ak kote yo pote SKF.
3. Bay vibrasyon ki estab e pwisan jiska 600KN, ak yon vitès anpile 7.5m/min.
4. Li gen yon kranpon prensipal solid ak dirab ki fèt ak mwazi.S500 la reyalize yon balans nan gwosè, fleksibilite, ak efikasite, sa ki fè li ideyal pou divès pwojè konstriksyon.
-

Ekskavatè a itilize Juxiang S350 Sheet Pile Vibro Hammer
Valv kontwòl la nan bra oksilyè a, enstalasyon rapid. Pa bezwen tiyo adisyonèl.
1. Apwopriye pou ekskavatè ki peze 20 tòn (tankou: PC200, SK220, ZX210, CAT320).
2. Q355Bkò asye akHARDOX400kranpon asye
3. Avèk yonMotè Leduc(ki soti an Frans Hydro Leduc) akSKFkote yo pote &NOKtwous sele.
4. Fòs Vibrasyon jiska360 KN(36Tòn). Vitès anpile 10m/min. -
Ekskavatè a itilize Juxiang S1100 Sheet Pile Vibro Hammer.
1. 4 Estrikti Vibrasyon Eksantrik
2. Adapte ak ekskavatè ki peze ant 70 ak 90 tòn.
3. Pouvwa jiska 1100KN. Ka anpile nan yon vitès jiska 13 mèt pa minit.
4. Pi gwo mato a sou ekskavatè -

Juxiang Post Pile Vibro Hammer Pou Itilizasyon Excavator
1. Anfòm byen pou ekskavatè 15-80 tòn
2. avèk motè Parker enpòte ak kousinen SKF.
3. Ofri yon vibro-frape ki estab e pwisan jiska 1100KN. Vitès pil jiska 12m/s.
4. Kranpon konsepsyon espesyal, apwopriye pou sit pòs tankou solè -

Juxiang Side Grip Vibro Hammer pou Excavator
Yon fouyè pil ki gen priz lateral se yon ekipman enjenyè yo itilize pou fouye pil, kit se an bwa kit se an asye, nan tè a. Karakteristik distenktif li se prezans yon mekanis priz lateral ki pèmèt fouye pil la soti nan yon bò san machin nan pa bezwen deplase. Mekanis sa a pèmèt fouyè pil la travay efektivman nan espas limite epi li patikilyèman apwopriye pou sitiyasyon ki mande yon pozisyonman presi.